|
Безопасное прохождение поворотов
ГЛАВА 2. ПОСТРОЕНИЕ ОПТИМАЛЬНОЙ ТРАЕКТОРИИ
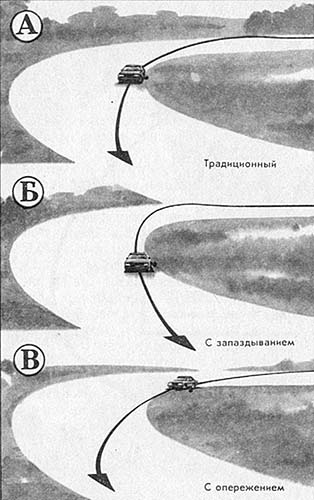
| Весьма важным условием безопасности движения на повороте является правильный выбор траектории. Многие считают оптимальной дугу окружности наибольшего радиуса (А), полагая, что максимальная скорость движения гарантирует минимальное время преодоления поворота. Однако это далеко не так, поскольку потери времени необходимо учитывать на всех фазах поворота, начиная с торможения при подходе и заканчивая разгоном на выходе. Так как время торможения автомобиля всегда меньше времени его разгона, то оптимальной является не симметричная (правильная) дуга, а траектория, которая позволит начать более ранний и интенсивный разгон. Она называется траекторией с "глубоким входом" и является наилучшей независимо от покрытия дороги и скорости движения (Б)
"Глубокий вход" выполняется следующим образом. Автомобиль движется по наружной стороне поворота, при этом водитель стремится как можно дольше ехать прямо. Это достаточно опасно и трудно выполнимо из-за большой вероятности того, что в начале маневра автомобиль, "не послушается" рулевого управления, а это в свою очередь спровоцирует еще более резкий поворот и срыв передних колес.
Условиями тактически правильного и наиболее быстрого прохождения поворота является, во-первых, полное использование ширины дорожного полотна (на входе и выходе автомобиль должен находиться у внешней его границы) и, во-вторых, точка касания автомобиля внутренней границы полотна (Б) должна быть как можно дальше по ходу движения.
Ранний вход в поворот (В) почти всегда является грубой тактической ошибкой. Он вызывает трудности в заключительной фазе: "доворот" на дуге увеличивает центробежную силу и провоцирует вынос автомобиля с полотна дороги.
|

| Траектория движения, построенная по этим принципам, обеспечивает максимальные скорость и ускорение на выходе. Движение на любом повороте условно можно разделить на четыре фазы.
I. Подход к повороту характеризуется снижением скорости до оптимальной, соответствующей геометрии поворота, и выходом на внешнюю его сторону, что обеспечивает минимальную кривизну траектории и максимальную скорость движения.
II. Вход в поворот теоретически представляется простым - водитель поворачивает рулевое колесо на угол, обеспечивающий движение по требуемой криволинейной траектории, и автомобиль начинает двигаться по заданной кривой - принимает маневр. Но на практике все гораздо сложнее. Чтобы пройти поворот на предельной скорости, а торможение начать как можно позже, переход автомобиля от прямолинейного движения к криволинейному должен протекать, как правило, на грани потери сцепления колес с дорогой. Поэтому не исключена ситуация, в которой передние колеса срываются в скольжение и автомобиль продолжает движение прямо.
III. Движение по дуге делится на два этапа: от момента входа до точки касания внутренней границы дорожного полотна (дуга постоянного радиуса); от точки касания до выхода из поворота (распрямляющаяся кривая). Второй этап имеет особенность, характерную для поворотов любых категорий. На этом участке пути следует одновременно плавно поворачивать рулевое колесо и интенсивно разгоняться сразу же после прохождения вершины поворота, а точнее - точки касания границы дорожного полотна. Для плавного перехода к прямолинейному движению необходимо поворачивать рулевое колесо так, чтобы скорость его вращения обязательно соответствовала скорости движения автомобиля, и ни в коем случае не выпускать руль из рук, не давая ему самостоятельно раскручиваться до нейтрального положения.
IV. Выход из поворота включает в себя переход к прямолинейному движению и выравнивание автомобиля. Практика показала, что в этой фазе чаще всего сказываются ошибки при движении по кривой, которые приводят к заносу. Как правило, это слишком резкое нажатие на педаль управления подачей топлива.
|
|